
Ландшафтный дизайн для робота-газонокосилки: правила и ошибки
Философия Robot-Centric Design
Наблюдать, как роботизированная газонокосилка стоимостью в сотни тысяч рублей беспомощно шлифует дорогой декоративный гравий — зрелище ироничное. Это классический конфликт: ландшафтный проект создавался ради картинки, игнорируя физику. Ошибки навигации здесь вторичны; первична несовместимость среды и исполнителя.

Алгоритмы пасуют перед щебнем, так как датчики не отличают его от вязкой почвы, а колеса мгновенно зарываются. Выход — Robot-Centric Design. Это проектирование, где дизайн для робота (радиусы, демпферы, уровни) закладывается в эскиз. Без этого автоматизация сада превращается в бесконечный квест по спасению гаджета из плена.
Для ландшафтного дизайнера изгиб дорожки — это экспрессия, а для лидара — хаос отражений. Мы часто сталкиваемся с когнитивным диссонансом: визуальный идеал убивает автономность. Алгоритм SLAM пасует перед «дикими» углами, где робот превращается в зацикленный бенчмарк. Robot-Centric Design требует жертв от классической эстетики в пользу логики навигации. Если радиус разворота меньше аппаратного минимума, вы получите не сад, а зону вечного рендеринга ошибок. Мой опыт тестирования GPU подсказывает: оптимизация геометрии участка важнее сырой мощности процессора косилки. Красота обязана быть функциональной, иначе ваш «умный» помощник станет просто дорогим садовым гномом.
Для меня сад — это не декорация, а сложнейший Hardware, где биоценоз выполняет роль интерфейса. Я рассматриваю участок как единую ОС, в которой вегетативные циклы — это фоновые процессы, а робототехника — исполнительные скрипты. Ошибка большинства в том, что они пытаются «вкорячить» гаджеты в ландшафт как внешние плагины.
Мой подход — нативная интеграция. Если датчик влажности не учитывает гигроскопичность конкретного грунта, это баг архитектуры. Автоматизация эффективна лишь тогда, когда алгоритм кошения синхронизирован с тургором травы. Мы создаем экосистему, где кремниевые чипы и хлорофилл работают в едином адресном пространстве.
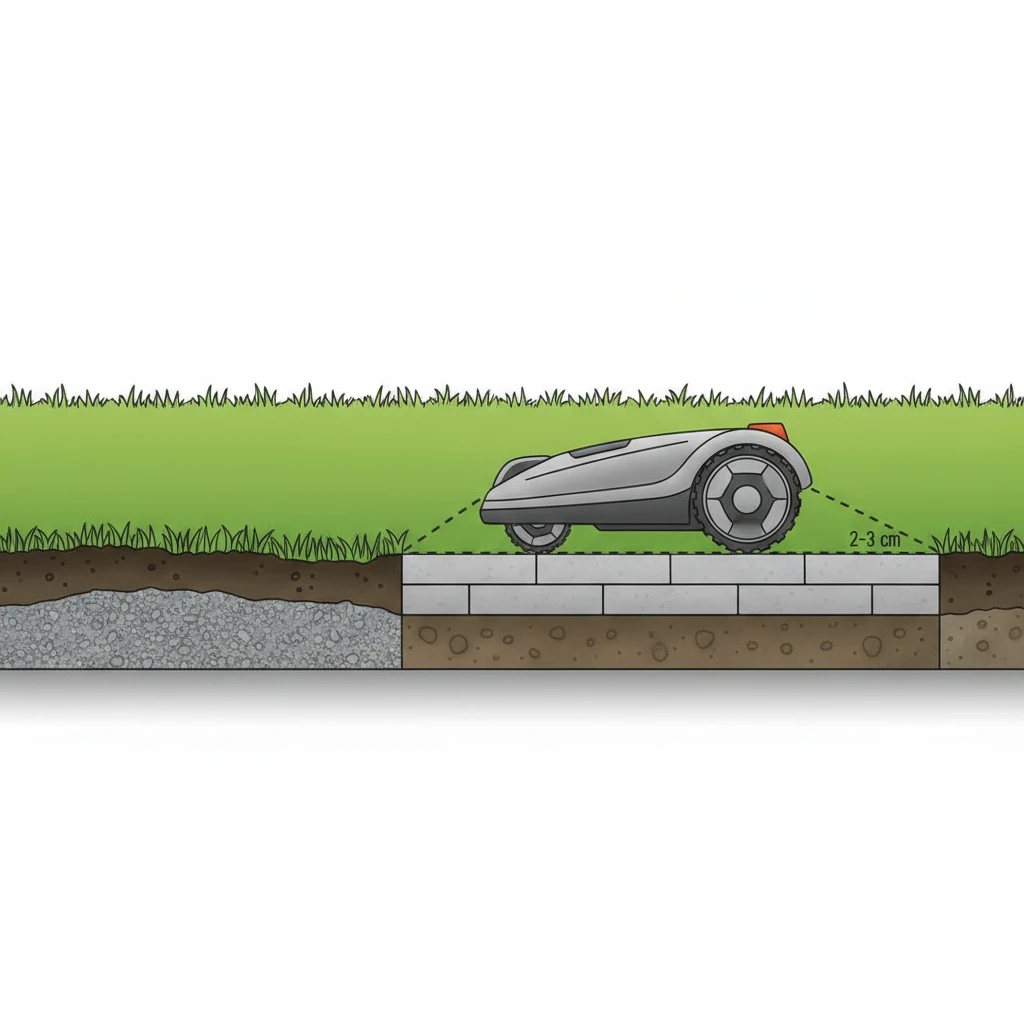
Схема укладки бордюрного камня вровень с газоном (Flush edge) с указанием заступа ножей робота.
Проектирование бесшовных переходов и барьеров
Чтобы исключить ручной докос, я проектирую нулевой уровень (Flush edge): газон и мощение должны быть в одной плоскости. Оптимальная плитка для кошения в край шириной 15–20 см позволяет девайсу заносить режущую деку за линию травы. Если на пути встречается кизильник блестящий для живой изгороди, высаживайте его с отступом 30 см от границы, создавая приствольную полосу из мульчи. Это защитит стволы от контактов и обеспечит достаточный радиус разворота. В такой конфигурации даже узкий проход перестает быть «слепой» зоной кошения, превращая сад в безошибочный алгоритм.
Flush edge — это не про эстетику, а про дельту высот, стремящуюся к абсолютному нулю. Как инженер, я настаиваю: уровень мощения обязан прецизионно совпадать с плоскостью дернины. Если перепад превышает 10-15 мм, робот либо шлифует пластик корпуса о бордюр, либо оставляет неопрятную «челку» из травы, вынуждая вас снова доставать триммер.
Магия заключается в выносе режущей кромки за пределы газона: твердое покрытие становится технической зоной разворота. Используйте бетонную подготовку или стальные профили — жесткая фиксация предотвратит пучение грунта. Помните: каждый лишний миллиметр высоты — это ваши потерянные часы на ручную доработку краев. В мире автоматизации ноль равен свободе.
Живая изгородь для робота — не просто декор, а сложный акустический экран. Рыхлые кустарники — ловушка: лидар часто «прошивает» их насквозь, принимая пустоты за свободный путь, что ведет к повреждению и веток, и механики. Для стабильной работы сенсоров плотность фито-массы должна быть гомогенной.
Я рекомендую комбинировать биологию с физикой: у основания кустов формируйте «мягкий стопор» — полосу плотного дерна или скрытый кант. Это дает корректный отклик на бампер при физическом контакте. Учтите, что глянцевая листва может бликовать, сбивая ИК-датчики. В моей практике идеальный барьер — это предсказуемый эхо-профиль, а не хаотичные джунгли.

Визуализация сигнала RTK-GPS: лучи от спутников проходят сквозь редкую крону, но блокируются плотной стеной дома. Схема идеального размещения базовой станции на коньке крыши.
Борьба за стабильный сигнал RTK
Для RTK-GPS навигации законы физики незыблемы: любая экранировка превращает высокотехнологичный гаджет в беспомощный кирпич. Чтобы установка RTK-антенны обеспечила точность в 2-3 см, забудьте о желании «спрятать» её в нише. Идеальная точка — конек крыши, где линия горизонта максимально открыта.
Влажный хлорофилл — коварный поглотитель: если редкая крона вносит лишь шум, то плотная листва создает глухие мертвые зоны, блокируя сигнал GPS. Пока док-станция может стоять под защитой строений, база обязана доминировать над рельефом. В зоне кошения каждый потерянный спутник — это риск для ваших посадок, поэтому планируйте радиоэфир так же тщательно, как и систему дренажа.
Для автономного кошения без провода RTK — единственный путь. Ообычный GPS дает погрешность до 5 метров, превращая робота в слепого крота. Технология Real-Time Kinematic через фазовые измерения и коррекцию от базы снижает девиацию до 2-3 см. Это позволяет косить впритык к миксбордерам без риска для роз.
Но помните: мокрая листва — экран для частот L1/L2. Эффект многолучевости в тени деревьев ослепляет систему. Я настаиваю: выносите базу на кровлю. Чистый горизонт важнее эстетики. Без стабильной триангуляции ваш кремниевый помощник превратит коллекционный сад в полигон для испытаний на выносливость.
Док-станция — «ахиллесова пята» дизайна. Как агроном, я не терплю пластиковых коробок на газоне, а как инженер — требую защиты узлов. Решение — интеграция в рельеф или лифтовые шахты. Главное здесь — физика: кровля не должна экранировать RTK-сигнал. Забудьте о железобетоне; только радиопрозрачные композиты.
Критически важен дренаж: под базой обязательна подушка из гравия, иначе первая гроза превратит контроллер в электролизную ванну. Помните, герметичность — это миф. Без принудительной вентиляции конденсат убьет литий-ионные ячейки быстрее, чем циклы заряда. Эстетика обязана быть функциональной.
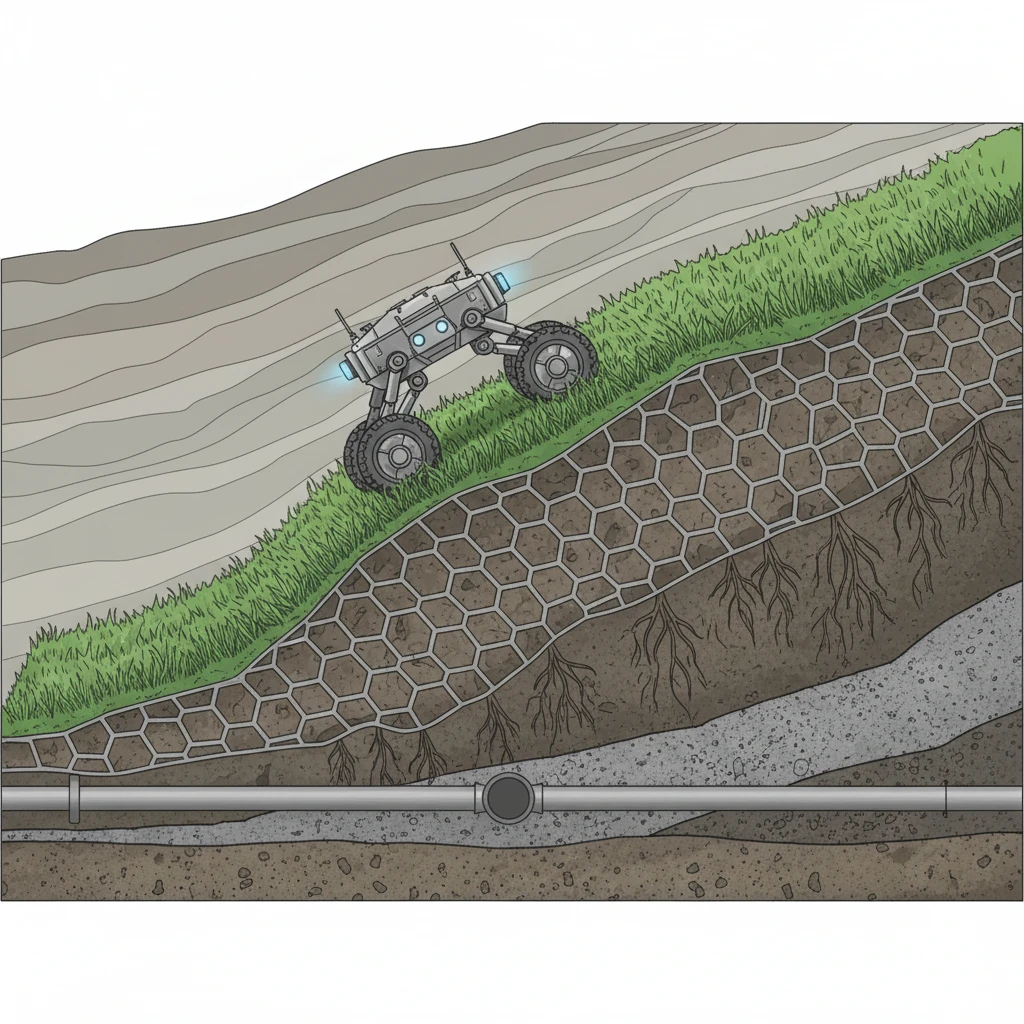
Чертеж разреза склона с использованием скрытой георешетки, заполненной грунтом и засеянной травой.
Решения для сложных склонов
Для кремниевого мозга уклон поверхности свыше 20 градусов — это не ландшафтный изыск, а приговор. Большинство роботов превращаются в беспомощных «черепах» уже при 25–30°, когда протектор теряет сцепление с влажной травой. Чтобы максимальный уклон не стал зоной вечного буксования, я проектирую «армированный пирог». Скрытая георешетка под газон решает проблему без бетонирования: она фиксирует грунт, создавая жесткий каркас, по которому колеса идут как по рельсам. Правильный дренаж основания исключает заиливание ячеек, сохраняя биомеханику почвы. В итоге даже чуткий датчик препятствий не фиксирует ложных срабатываний от задирания носа на кочках.
Забудьте про рекламные «45% преодолеваемого уклона» — в переводе на человеческий это всего 24 градуса. Когда вектор силы тяжести смещает центр масс, даже топовый робот превращается в шлифовальную машину. При достижении критического угла протектор перестает цепляться за дернину, возникает микропробуксовка.
Результат предсказуем: уничтоженный узел кущения травы и проплешины. Как агроном, я настаиваю: если уклон выше 20°, «монопривод» противопоказан. Для таких зон я выбираю AWD-модели или кастомные стальные колеса-«зубатки». Помните: избыточный крутящий момент при плохой адгезии — это самый быстрый способ превратить ваш премиальный газон в полигон для испытаний гусеничной техники.
Когда уклон превышает 20°, даже полноприводные роботы начинают «шлифовать» дерн, превращая премиальный мятлик в грязное месиво. Как инженер, я вижу здесь дефицит сцепления; как агроном — фатальное повреждение узла кущения. Решением становится объемная георешетка.
Это жесткий экзоскелет, переносящий давление колес на основание, минуя нежные корни. Я рекомендую соты высотой 40–50 мм с засыпкой субстратом на 5 мм ниже края. Трава прошивает модули, создавая армированный ковер, где техника движется без пробуксовок даже после ливня. Это чистая физика: мы увеличиваем коэффициент трения, не жертвуя эстетикой живого ландшафта.

Защита коллекции и выбор мульчи
Для робота-косилки сосновая кора — не декор, а абразивный снаряд. Легкая мульча для робота коварна: она затягивается потоком воздуха в деку, мгновенно затупляя ножи. В приствольных кругах я рекомендую галечник, отделенный от газона скрытым бордюром — это лучшая защита коры и режущих узлов.
Пока ограничительный провод держит статический периметр, эфемерные первоцветы спасают виртуальные стены. В приложении создается временная No-Go Zone на период вегетации. Даже топовый датчик препятствий может «зевнуть» тонкий стебель крокуса, поэтому программная блокировка — единственный путь к выживанию вашей коллекции.
Для агронома сосновая кора — идеальный терморегулятор, но для инженера это абразивный мусор. Легкая фракция мульчи неизбежно мигрирует на газон под воздействием турбулентных потоков от ножей. Результат? Превращение прецизионного инструмента в тупую жестянку. Попадание коры в ротор сопоставимо с попаданием гайки в турбину: неизбежна разбалансировка и микросколы кромки. Если эстетика требует органики, используйте только тяжелую фракцию с заглублением уровня на 5 см ниже бордюра. Мой вердикт: в зоне работы робота инертная галька технологически выигрывает у «красивой» щепы по всем показателям износостойкости системы.
Доверять софтверным No-Go зонам — это как полагаться на GPS в густом лесу: рано или поздно алгоритм «дрифтанет», и ваши коллекционные хосты пойдут на мульчу. Виртуальная граница в приложении — лишь математическая абстракция, пасующая перед плотной облачностью или разросшейся листвой.
Для меня надежность измеряется физикой. Жесткий бордюр вровень с газоном — единственный барьер, не требующий обновлений прошивки. Пока маркетологи воспевают точность позиционирования, практика диктует: софт хорош для временных зон, но только механический стопор гарантированно спасет ножи от встречи с камнем, а бюджет владельца — от лишних трат на запчасти.

Интеллектуальная экосистема и этика автоматизации
Автономная косилка и спринклеры — конфликт интересов на одном поле. Чтобы не превратить роботизированную газонокосилку в подводную лодку, я внедряю Home Assistant. Через автоматизацию MQTT система мониторит статус: если док-станция пуста, запуск форсунок блокируется. Вода под давлением — враг подшипников, даже при высоком IP. Сценарий полив-кошение, опираясь на датчик дождя и влажность (как видно на скриншоте интерфейса), принудительно загоняет робота в укрытие перед циклом орошения. Интеграция превращает два гаджета в единый организм, исключая износ электроники от лишней влаги.
Для дилетанта дождь — это влага, для инженера-агронома — изменение коэффициента сцепления и риск деградации структуры почвы. Синхронизация через API — единственный способ избежать конфликта между форсунками Hunter и ножами робота. Я категорически не доверяю штатным гигроскопическим датчикам: они инертны и часто лгут.
Настоящий контроль строится на JSON-запросах через Home Assistant. Если датчики влажности фиксируют более 25%, скрипт мгновенно переводит косилку в статус «Parked». Мы исключаем «эффект болота», сохраняя тургор травы и ресурс приводов. В моей экосистеме софт так же важен, как и азотные удобрения: код должен быть чище, чем газон после финишного прохода.
Для инженера ночной запуск робота — логичный способ разгрузить график. Но как агроном, я вижу в этом биологическую ловушку. Ежи не убегают от шума, а сворачиваются в шар, превращаясь в статичную мишень для роторных ножей. Тестируя сенсоры, я убедился: даже LiDAR в густой траве и сумерках дает фатальный процент ошибок. Этичная автоматизация требует не новых паттернов кода, а уважения к фауне. Мой вердикт суров: запрет на покос в темное время суток. Настройте сценарии через API с привязкой к астрономическому закату. Сохраненная жизнь важнее, чем идеальный срез травы к утреннему кофе.
Чек-лист идеального
Чтобы автономная косилка не превратилась в дорогое пресс-папье, подготовьте «прошивку» ландшафта. Мой алгоритм предстартовой настройки:
- Ревизия чертежей. Сверьте реальный ландшафтный проект с геометрией маневров: исключите «бутылочные горлышки» менее 80 см.
- Сегментация. Каждая зона кошения должна иметь жесткий бордюр в уровень с почвой, исключающий ручной триммер.
- Инженерный фильтр. Устраните микрорельеф: эксплуатация на кочках убивает подшипники ножевого диска.
- Интеграция. Синхронизируйте по API циклы автополива и график выезда.
- Сервисный хаб. Грамотное планирование участка включает защищенный бокс, где обслуживание робота будет быстрым и чистым.
Помните: кремний требует предсказуемости, а не садового хаоса.
Создание автономного ландшафта — это не шопинг в отделе электроники, а прецизионная инженерная задача. За 20 лет я убедился: если владелец подстраивается под технику, система мертва. Robot-Centric Design превращает хаос природы в предсказуемую среду, где RTK-сигнал непоколебим, а геометрия границ исключает ручной триммер. Мы интегрируем железо в биологические циклы, добиваясь синергии, а не конфликта. Истинная ценность — это сад как стабильная операционная система, где каждый ватт энергии и литр воды расходуются с математической точностью, освобождая ваше время для жизни.
Автор - Козырева Татьяна, ведущий агроном садовой компании Центросад.
Философия Robot-Centric Design Наблюдать, как роботизированная газонокосилка…

