
Ученые создали робота, который сам учится, думает, и выполняет сложные команды
После того, как робот получает задание, которое он никогда прежде не выполнял, робот думает так же, как думает человек, он делает предположения и принимает решения на основе своего предыдущего опыта. К примеру, роботу дают задание налить стакан воды, охладить его и передать человеку. Робот знает, какие предметы окружают его, и реагирует сообразно ситуации вокруг него. Робот SOINN анализирует каждое свое предыдущее и последующее действие. Налив воду, и узнав, что ее нужно охладить, робот понимает, что он не может взять кусок льда до тех пор, пока не освободит одну руку и не поставит что-нибудь на стол.
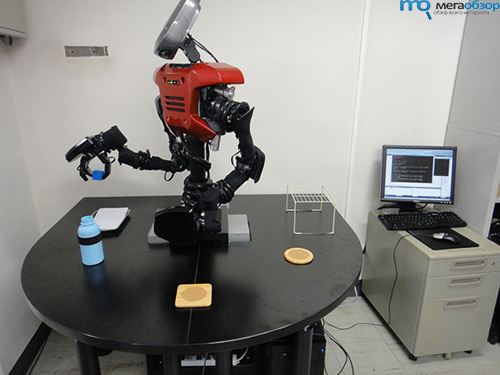
Бутылка больше не нужна, а стакан пригодится для дальнейшего выполнения задания, поэтому робот оставляет стакан в другой руке и опускает в него кусок льда. Следует заметить, что до получения задания робот понятия не имел, как это делается. В реальном мире искусственному интеллекту придется намного туже, поскольку внешние условия намного сложнее лабораторных. Радует тот факт, что алгоритм, использованный в проекте SOINN, задает фундаментальную базу для подобного искусственного интеллекта.
Философия Robot-Centric Design Наблюдать, как роботизированная газонокосилка…

